Hybrid Autonomous Unmanned Vehicles swarm (HAUVs)
For Future Maritime SPECIAL Operations
PLEIADES is a European collaborative research and innovation project advancing autonomous technologies.

Who We Are
PLEIADES is a European R&I project bringing together industry, research and academia to develop advanced autonomous technologies for covert and complex maritime operations.
The Challenges Addressed
Submarine operations in contested littoral waters face:
High detection risks
Communication constraints
PLEIADES addresses these through distributed, low-signature operations.
Innovation & Strategic Value
PLEIADES enables submarines to deploy HAUV swarms via an underwater carrier, providing:
Enhanced stealth
Extended reach
Autonomous Multi-domain coordination
Real-time situational awareness
THE CONCEPT
Recent developments in naval operations have revealed that swarms of unmanned vehicles can have a significant impact on mission effectiveness. The war in Ukraine demonstrates that drones, with varying levels of sophistication, autonomy, and functionality, have become a crucial component of modern warfare. When effectively integrated into operations, drones offer asymmetric advantages, delivering cost- effective intelligence, reconnaissance, and strike capabilities.
A swarm of unmanned vehicles can deliver unprecedented capabilities, enhancing Europe’s safety and defence. Their combined use reduces human risk in hazardous environments and enables monitoring of contested maritime areas and littoral waters.
The PLEIADES Project, based on Artificial intelligence and robotic autonomous systems, aims to create an innovative solution that improves readiness, sustainability, safety, deployability and operational capabilities of naval forces, while taking care to respect Ethical issues associated with AI systems/technologies in the research work. This innovative approach aims to boost the performance of future naval operations by addressing the vulnerabilities that submarines face when conducting operations in enemy littoral waters.
The research action of PLEIADES project focuses on an innovative system not previously applied in naval operations. PLEIADES will study and design a system capable of launching a swarm of Hybrid AUVs (HAUVs) from a submarine at depth, via a carrier unit, which will transport the swarm to the deployment area, allowing the submarine to remain distant from adversary territory. Upon reaching the deployment point, the swarm will leave the carrier unit and execute underwater, aerial, or combined missions according to operational needs.
This project focuses on using a submarine launched, primarily wire-guided vehicle (carrier unit) that supports, if needed, fully autonomous underwater operation, in order to transport a HAUV swarm close to the operational area, thereby maximizing innovation in deployment methods.
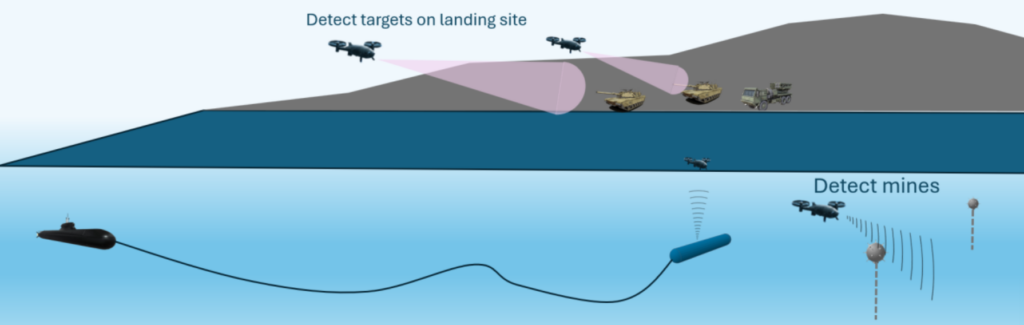
The swarm will then execute various missions, such as ISR, MCM, target tracking, and identification. By arriving undetected underwater, the HAUV swarm reduces the enemy’s early warning capabilities and enhances the effectiveness of covert operations. The submarine maintains, via a fibre optic cable, a real-time connection with the carrier, which is acting as forward operated communications hub, enabling seamless communication with the swarm.
This setup allows the submarine to operate safely beyond the reach of potential threats, utilizing the length of the fibre optic cable to ensure both covertness and real-time situational awareness during missions.
THE KEY OBJECTIVES TO REACH TRL4 AT THE END OF THE PROJECT
01.
Intelligent System Behaviour
To analyse and define the Intelligent System behaviour and to identify and mitigate ethical risks, optimizing human – AI collaboration.
02.
Operational Framework
To define the operational requirements and scenarios for which the system can work.
03.
System
Design
To design and define the structural framework, the stealthiness solutions and energy requirements for both, the HUAV and the carrier.
04.
Swarm
Capability
To develop advanced methodologies for hybrid air-aquatic drone swarms operating in complex, GPS-denied environments, capable to provide multi-domain situational awareness.
05.
C4I System
Architecture
To design and implement a robust architecture that integrates the Command, Control, Communication, Computers and Intelligence (C4I) systems between the submarine, the Carrier Unit, and the HAUV swarm.
06.
Proof
of Concept
To define and implement the proof-of-concept tests for the system.
THE KEY TECHNOLOGIES
A swarm carrier unit suitable for launch from a submarine’s torpedo tube and transiting to the operational area and upon arrival at the designated location, deploying the swarm of HAUVs in the sea.
HAUVs capable of moving seamlessly in both domains air and sea within specific design constraints to be operative from an underwater carrier as a swarm.
A system that provides efficient Command, Control, Communication, Computer and Intelligence (C4I) architecture that integrates the C3 sub-systems between the submarine, the carrier, and the swarm. This will enable seamless communication for real-time data exchange between the aerial and underwater components of the swarm, ensuring reliable operation across multiple domains.
The capability of the swarm to conduct parallel operations simultaneously in both air and underwater domains.
Advanced AI protocols to enable the swarm to effectively perform tasks even in case of communication loss.
Innovative sensing technology will be employed through the integration of fiber Bragg grating (FBG) optical sensors within structural elements, enabling continuous, real-time monitoring of structural health and performance.
The growing use of swarm technology in unmanned operations requires secure, reliable communication systems. The Submarine Onboard Control Station (SOCS), integrated into the submarine’s TS or as a standalone system, will use optical communication wires to maintain connectivity between the submarine, carrier, and swarm units, enabling missions such as Intelligence, Surveillance, and Reconnaissance (ISR).
EXPECTED IMPACT
- Strengthens European capabilities in trustworthy maritime autonomy by developing and demonstrating advanced Submarine ISR capabilities using Hybrid Autonomous Unmanned Vehicles HAUVs and HAUVs swarm operations aligned with European values, ethics, and operational needs.
- At operational and tactical levels, PLEIADES enhances submarine naval mission effectiveness, situational awareness, and resilience through supervised autonomous swarm capabilities.
- The project enables modular, interoperable, and human-centred autonomy that reduces operator workload, improves asset availability, and lowers operational risk while ensuring safe underwater operations.
- At industrial level, PLEIADES reinforces the European Defence Technological and Industrial Base (EDTIB) by fostering collaboration among system integrators, suppliers, RTOs and SMEs.
- Beyond defence, the PLEIADES approach to autonomy, risk management, and human-supervised swarm control is transferable to civil maritime applications, including environmental monitoring and infrastructure inspection, increasing overall societal and economic value.
Some
Numbers
Months of Project Duration
European Consortium Partners
M€
Project Budget
Countries
A EUROPEAN DEFENCE FUND PROJECT
PLEIADES (Project No 101224047) is a European defence research project financed by the European Defence Fund (EDF), an EU initiative that supports collaborative research and development of defence technologies across Member States.
As part of this initiative, PLEIADES brings together partners from across the EU to advance autonomous underwater technologies that contribute to Europe’s defence autonomy, resilience and security.